
RoboScout DTC: Emergency Response for Automated Intelligent Assessment on Mass Causality Incidents
Recent developments in human-robotic rescue teams have focused on improving their ability to efficiently perform triage in mass casualty incidents. The key elements to achieve such a challenging task entail the ability of the robots to autonomously localize the casualties in the area, identify accessible pathways to reach the casualties quickly and safely while avoiding various obstacles, and efficiently assess the injuries of the casualties by collecting a sufficient and diverse dataset utilizing different types of sensors.
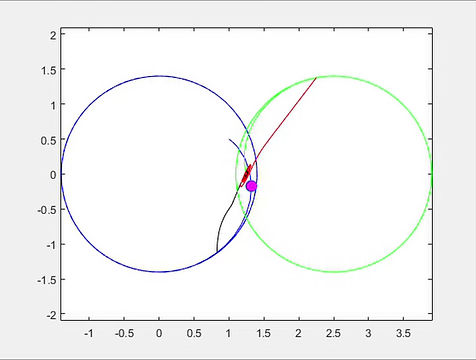
Path-following control for Autonomous Surface Vehicles
Marine geophysical surveys are a critical first step in informing a wide variety of industries about the seafloor. Many of these marine surveys are increasingly conducted utilizing ASV to increase safety, decrease carbon footprint, and provide force multiplication for operational efficiency. This work implements and demonstrates improved motion control of an ASV that can have a significant impact on its field performance and the quality of collected data, eliminating artifacts that cannot be easily removed in post-processing.
2024 Autonomous Systems Bootcamp
The goal of this bootcamp is to bring together marine and ocean science experts and roboticists across academia, government, and industry to address real-world challenges defined by marine scientists and oceanographers and real-world problems they face in their work. We think that employing marine technology can solve these challenges and provide tools that scientists can use to optimize their time and effort. The solutions developed over this bootcamp will be applied in research thrust areas such as oceanography, fisheries, and aquaculture and will involve vehicle navigation, localization and planning, decision-making techniques, machine learning, and object detection.
Projects
Path-following control for Autonomous Surface Vehicles

Multi-behavioral Multi-agent Systems
This work outlines a methodology for the construction of vector fields that can enable a multi-robot system moving on the plane to generate multiple dynamical behaviors by adjusting a single scalar parameter. This parameter essentially triggers a Hopf bifurcation in an underlying time-varying dynamical system that steers a robotic swarm. This way, the swarm can exhibit a variety of behaviors that arise from the same set of continuous differential equations. Other approaches to bifurcation-based swarm coordination rely on agent interaction which cannot be realized if the swarm members cannot sense or communicate with one another. The contribution of this paper is to offer an alternative method for steering minimally instrumented multi-robot collectives with a control strategy that can realize a multitude of dynamical behaviors without switching their constituent equations.
Marine geophysical surveys are a critical first step in informing a wide variety of industries about the seafloor. Many of these marine surveys are increasingly conducted utilizing ASV to increase safety, decrease carbon footprint, and provide force multiplication for operational efficiency. This work implements and demonstrates improved motion control of an ASV that can have a significant impact on its field performance and the quality of collected data, eliminating artifacts that cannot be easily removed in post-processing.

Pediatric Motor Rehabilitation via Socially Interacting Robot Collectives
This project is motivated by our long-term goal of improving quality of life through innovative technology capable of interacting physically with the environment and cognitively with humans. In this context, the overall objective of this particular proposal is to develop new intervention methods that can (a) improve rehabilitation outcomes and developmental progression for young children with motor disabilities compared to the standard of care for this population, and (b) alleviate stressors on the children’s caregivers. Our central hypothesis is that socially interacting robot swarms can be a key element of a potent enriched environment (ee) for pediatric rehabilitation; specifically, it critically contributes to the environment’s success by allowing it to be anticipatory, reactive, adaptive, and rehabilitation goal-driven.
Resilient Ground Vehicle Autonomous Navigation in GPS-Denied Environments
Co-design and integration of vehicle navigation and control and state estimation is key for enabling field deployment of mobile robots in GPS-denied cluttered environments, and sensor calibration is critical for successful operation of both subsystems. This work demonstrates the potential of this co-design approach with field tests of the integration of a reactive receding horizon-based motion planner and controller with an inertial aided multi-sensor calibration scheme. The reported method provides accurate calibration parameters that improve the performance of the state estimator, and enable the motion controller to generate smooth and continuous minimal-jerk trajectories based on local LiDAR data.
